


Description:
APM V2.8.0 Flight Controller
Needle: staight
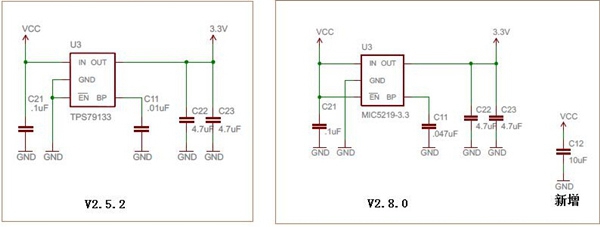
Power supply: LP2985-3.3
Max voltage: 16V
Add a 47uF tantalum capacitor
Port: MUX (UART0, UART2, mnnI2 and OSD are optional, OSD is the defaulted output)
Jumper cap choose:
1. Built-in compass: plug the jumper cap in the MAG pin header.
2. External compass: pull up the jumper cap from the MAG pin header.
Ublox NEO-6M GPS
1. Built-in compass: plug the jumper cap in the MAG pin header.
2. External compass: pull up the jumper cap from the MAG pin header.
Type
Standalone GPS
Supply
2.7 V – 3.6 V
Supported antennas
Active and passive
Backup power
1.4 V – 3.6 V, 22 μA
Interfaces
UART, USB, DDC (I2C compliant) and SPI
Oscillator
Crystal
Operating temp.
–40° C to 85° C
Storage temp.
–40° C to 85° C
Navigation update rate
up to 5 Hz
Receiver type
50-channel u-blox 6 engine
GPS L1 C/A code
SBAS: WAAS, EGNOS, MSAS
Accuracy
Position: 2.5 m CEP
SBAS: 2.0 m CEP
Acquisition
Cold starts: 27 s
Aided starts: < 3 s
Hot starts: 1 s
Sensitivity
Tracking: –161 dBm
Cold starts: –147 dBm
Hot starts: –156 dBm
Features
Simple integration with u-blox wireless modules.A-GPS: AssistNow Online and AssistNow Offline services,
OMA SUPL compliant.
Backward compatible (hardware and firmware); easy
migration from NEO-5 family or NEO-4S.
LCC package for reliable and cost effective manufacturing.
Compatible with u-blox GPS Solution for Android.
Based on GPS chips qualified according to AEC-Q100.
Manufactured in ISO/TS 16949 certified production sites.
Qualified according to ISO 16750.
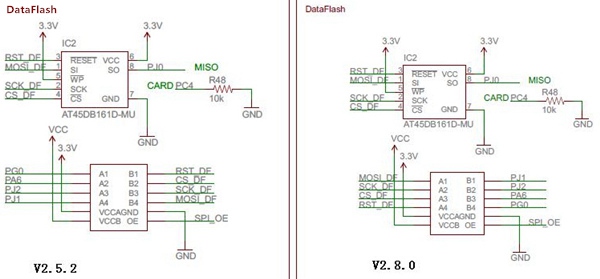
APM_v2.8.0_schematic diagram
ESC SCH
Package included:
1 x APM2.8.0 flight controller
1 x 6M GPS